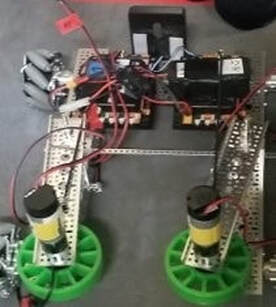
This was one of the first chassis we built. We built this chassis right after kickoff. This chassis has 4 individually powered Mecanum wheels and 2 stationary compliant wheels as an intake mechanism.

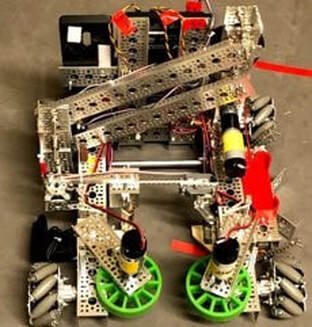
This was our league 1 chassis. It includes a claw with 3 ranges of motion as the second stage of our intake. It is attached to drawer slides towards the back of the robot and can extend (insert #) inches. In addition, we had a webcam for Skystone and Vuemark detection.
This was our league 2 chassis. We added 2 servos for moving the foundation and changed our second stage to a 4-bar linkage system. This allowed us to stack more stones. We also improved our claw.
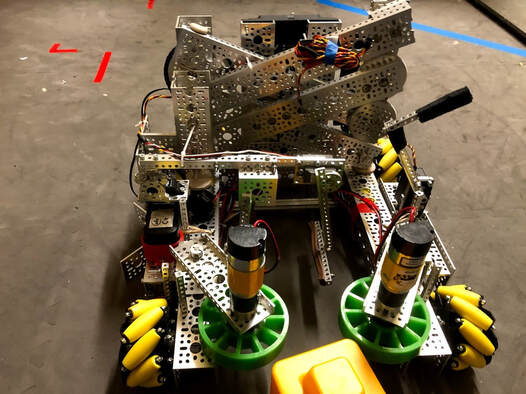
This is our interleague chassis. We have a reverse 4-bar linkage to further increase the number of stones we can stack. We also have a folding intake which takes up less space and allows for more mechanisms like this autonomous arm.
